In the vast system of embedded applications, no microcontroller can perform all the activities by itself and so it has to communicate to other devices to share information. There are many different types of communication protocols used by microcontrollers to share these information’s, but the most used ones are USART, IIC, SPI and CAN. Each communication protocol has its own advantage and disadvantage. To learn how to work with these communication protocols in PIC microcontroller, Below are few tutorials which provide the complete guide to use these communication protocols.
1. PIC Microcontroller I2C Communication
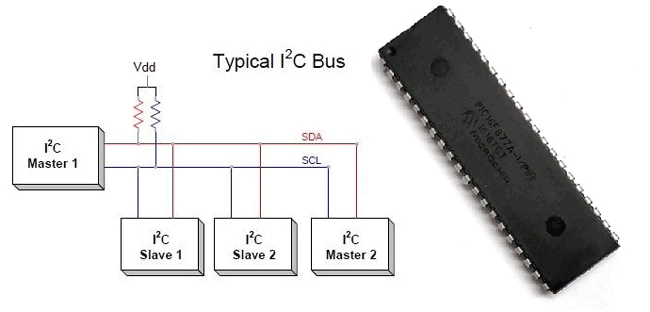
The term IIC stands for “Inter Integrated Circuits”. It is normally denoted as I2C or I squared C or even as 2-wire interface protocol (TWI) at some places but it all means the same. I2C is a synchronous communication protocol meaning, both the devices that are sharing the information must share a common clock signal. It has only two wires to share information out of which one is used for the cock signal and the other is used for sending and receiving data.
Click the link to learn more about PIC microcontroller I2C communication
2. PIC Microcontroller SPI communication
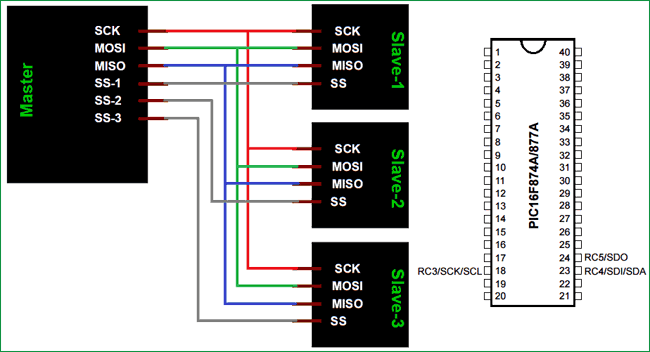
The term SPI stands for “Serial Peripheral Interface”. It is a common communication protocol that is used to send data between two microcontrollers or to read/write data from a sensor to a microcontroller. It is also used to communicate with SD cards, shift registers, Display controllers and much more. Know more about PIC SPI communication
3. PIC Microcontroller UART Communication
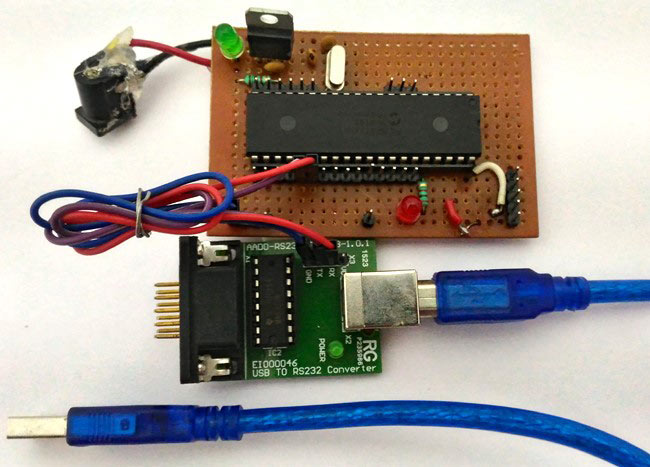
Here we have used PIC16F877A MCU, it has a module called “Addressable Universal Synchronous Asynchronous Receiver and Transmitter” shortly known as USART. USART is a two wire communication system in which the data flow serially. USART is also a full-duplex communication, means you can send and receive data at the same time which can be used to communicate with peripheral devices, such as CRT terminals and personal computers. Know more about PIC UART communication.
4. CAN Communication with PIC Microcontroller
Bring communication and connectivity in your embedded design to the next level with Microchip's Controller Area Network (CAN) bus solutions technology. Originally created for automotive applications, the CAN bus protocol is a high-speed, reliable communication protocol for applications requiring robust communications at bit rates reaching 8 Mbps. Incorporating the CAN bus protocol into your design is a low-cost, reliable way to function in a difficult electrical environment with a high degree of real-time capability. Learn more about CAN communication here.
1. PIC Microcontroller I2C Communication
The term IIC stands for “Inter Integrated Circuits”. It is normally denoted as I2C or I squared C or even as 2-wire interface protocol (TWI) at some places but it all means the same. I2C is a synchronous communication protocol meaning, both the devices that are sharing the information must share a common clock signal. It has only two wires to share information out of which one is used for the cock signal and the other is used for sending and receiving data.
Click the link to learn more about PIC microcontroller I2C communication
2. PIC Microcontroller SPI communication
The term SPI stands for “Serial Peripheral Interface”. It is a common communication protocol that is used to send data between two microcontrollers or to read/write data from a sensor to a microcontroller. It is also used to communicate with SD cards, shift registers, Display controllers and much more. Know more about PIC SPI communication
3. PIC Microcontroller UART Communication
Here we have used PIC16F877A MCU, it has a module called “Addressable Universal Synchronous Asynchronous Receiver and Transmitter” shortly known as USART. USART is a two wire communication system in which the data flow serially. USART is also a full-duplex communication, means you can send and receive data at the same time which can be used to communicate with peripheral devices, such as CRT terminals and personal computers. Know more about PIC UART communication.
4. CAN Communication with PIC Microcontroller
Bring communication and connectivity in your embedded design to the next level with Microchip's Controller Area Network (CAN) bus solutions technology. Originally created for automotive applications, the CAN bus protocol is a high-speed, reliable communication protocol for applications requiring robust communications at bit rates reaching 8 Mbps. Incorporating the CAN bus protocol into your design is a low-cost, reliable way to function in a difficult electrical environment with a high degree of real-time capability. Learn more about CAN communication here.