After being inspired by RYNO motors and other self balancing scooters from Segway, I always wanted to build something similar. Thinking for while, I decided to build a Self Balancing Robot using Arduino. This way I would be able to grasp the underlying concept behind all these scooters and also learn how PID algorithm works.
When I started building this self balancing robot, I realized that this bot is a bit of a challenge to build. There are so many options to select from and hence the confusions start right form selecting the motors and remains till tuning PID values. And there are so many things to consider like type of battery, position of battery, wheel grip, type of motor driver, maintaining the CoG (Centre of gravity) and much more. But let me break it to you, once you build it you will agree that it’s not as hard as it sounds to be. So let’s face it, in this tutorial I will document my experience in building the self balancing robot. You might be an absolute beginner who is just getting started or might have landed up here after a long frustration of not getting your bot to work. This place aims to be your final destination.
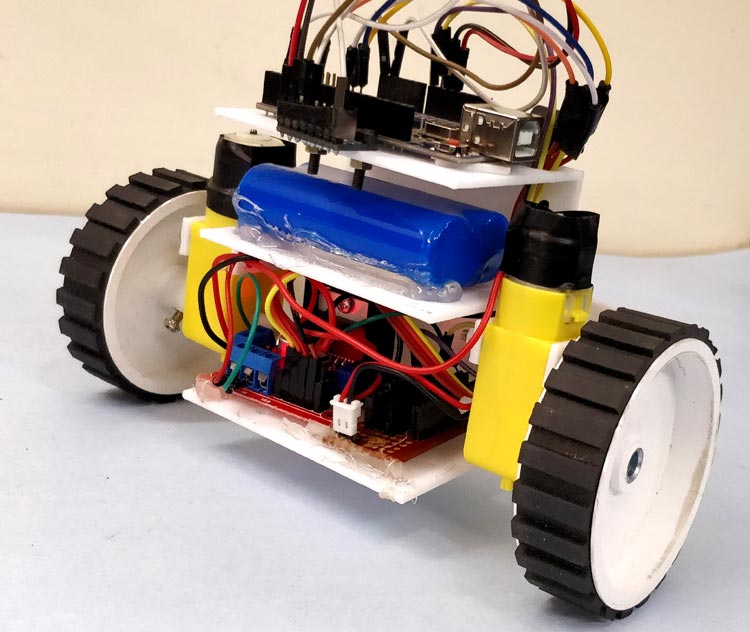
Below is the video of the Self Balancing Robot working.
You can find the complete DIY instructions along with schematic diagram and codes, required to build this Self Balancing Robot in the following link: https://circuitdigest.com/microcontroller-projects/arduino-based-self-balancing-robot
When I started building this self balancing robot, I realized that this bot is a bit of a challenge to build. There are so many options to select from and hence the confusions start right form selecting the motors and remains till tuning PID values. And there are so many things to consider like type of battery, position of battery, wheel grip, type of motor driver, maintaining the CoG (Centre of gravity) and much more. But let me break it to you, once you build it you will agree that it’s not as hard as it sounds to be. So let’s face it, in this tutorial I will document my experience in building the self balancing robot. You might be an absolute beginner who is just getting started or might have landed up here after a long frustration of not getting your bot to work. This place aims to be your final destination.
Below is the video of the Self Balancing Robot working.
You can find the complete DIY instructions along with schematic diagram and codes, required to build this Self Balancing Robot in the following link: https://circuitdigest.com/microcontroller-projects/arduino-based-self-balancing-robot